Voriges Nächstes Titelseite Inhaltsverzeichnis Abbildungsverzeichnis Tabellenverzeichnis
Auf der Basis der in Kapitel 4.1 erarbeiteten technisch-naturwissenschaftlichen Beziehungen zwischen Fahrzeugparametern und Fahrwiderständen und den in Kapitel 2.9 errechneten spezifischen externen Kosten lassen sich für Luftverschmutzung und Treibhauseffekt die zu erwartenden spezifischen externen Kosten eines automatisierten und dezentralisierten Eisenbahngüterverkehrs bestimmen. Auf der Basis der Überlegungen in Kapitel 4.3 lassen sich des weiteren begründete Vermutungen über die zu erwartenden externen Kosten durch Unfälle anstellen. Und auch über die zu erwartenden externen Kosten durch Lärm lassen sich vor dem Hintergrund der Diskussion in Kapitel 4.2 Aussagen treffen. Zunächst ist jedoch etwas konkreter als bisher festzulegen, von welchen technischen Parametern bei einem automatisierten Gütertriebwagen auszugehen ist, d. h. ein solches Fahrzeug muß im folgenden grob skizziert werden.
Im Rahmen der bisherigen Ausführungen wurde nur angenommen, daß ein fahrerloser Gütertriebwagen in etwa dieselbe Silhouette wie ein gedeckter Eisenbahngüterwagen oder ein normaler Lkw hat (die beide nicht nur annähernd dieselbe Form und Stirnfläche, sondern daher auch annähernd denselben Luftwiderstand haben), daß er auf Eisenbahnrädern rollt und etwa so viel wie ein (kleiner) gedeckter Eisenbahngüterwagen oder ein (großer) normaler Lkw wiegt (das Verhältnis von Eigengewicht zu Nutzlast ist bei beiden ebenfalls annähernd gleich). Dieser Rahmen umfaßt eine Vielzahl möglicher Fahrzeuge, eine etwas stärkere Eingrenzung ist nötig.
Als Orientierungspunkte können hierbei einerseits einige Beispiele für historische Gütertriebwagen dienen und andererseits die Annahmen über die Fahrzeugtechnik in den bisherigen Arbeiten, die sich mit automatisch fahrenden Gütertriebwagen und verwandten Konzepten beschäftigen.
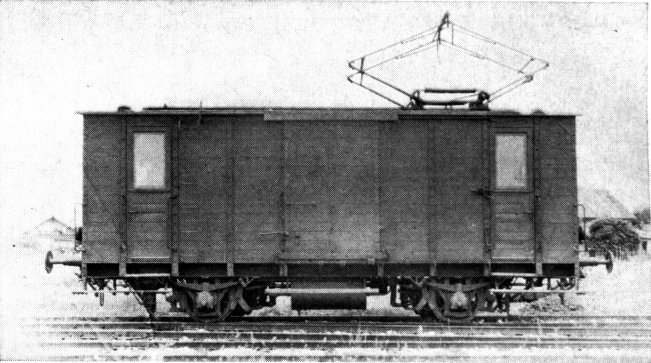
Gütertriebwagen waren nie sehr weit verbreitet, [311] aber es gab zum einen auf bestimmten Nebenbahnstrecken über längere Zeit regelmäßige Verkehre mit Gütertriebwagen, zum anderen gab es in den dreißiger Jahren den Versuch, mit neuen Angeboten im Stückgut-Schnellverkehr der wachsenden Konkurrenz durch den Straßengüterverkehr Paroli zu bieten, wobei auch Gütertriebwagen zum Einsatz kamen. [312] Wie man an den Abbildungen 9 bis 12 erkennen kann, orientiert sich das Äußere der Fahrzeuge am üblichen Erscheinungsbild von Güter- bzw. Gepäckwagen.
Abbildung
9: Gütertriebwagen der Baureihe VT 10 im März 1938 bei Hönningen
(Quelle:
O. V.
(1997c, S. 106))
Abbildung
10: Gütertriebwagen der Baureihe ET 194.1 von 1892
(Quelle:
Obermayer (1977b, S. 120))
Abbildung
11: Gütertriebwagen der Baureihe ET 194.2 von 1896
(Quelle:
Obermayer (1977b, S. 121))
Während die Fahrzeuge der Baureihen ET 194.1 und ET 194.2 mit einer Nennleistung von 86 kW bzw. 85 kW eine mit späteren Straßenfahrzeugen vergleichbare Motorisierung aufwiesen, [313] zeigt die Motorleistung des VT 20.5 mit 600 PS, daß das Fahrzeug wohl auch dafür vorgesehen war, kurze Züge mit sich zu ziehen. [314]
Abbildung
12: Gütertriebwagen der Baureihe VT 20.5 von 1938
(Quelle:
Obermayer (1977b, S. 148))
Rosebrock (1992, S. 29f) beschäftigt sich in seiner Arbeit primär mit der Systemsteuerung bzw. Routenfindung und Koordinierung fahrerloser Einzelwagen und daher finden sich bei ihm nur wenige Hinweise darauf, wie ein automatisiertes, dezentral gesteuertes Eisenbahnfahrzeug für den Gütertransport konkret aussehen könnte. Angeführt wird die Möglichkeit der Variation des RoadRailers [315] und des in der Schweiz eingeführten Abrollcontainer-Systems.
Abbildung
13:
RoadRailer
(Quelle:
Kuhla (1990, S. 670))
Frederich (1992a) zeigt zwar eine Skizze für ein entsprechendes Fahrzeug (die gewisse Reminiszenzen an ihre Herkunft nicht verbergen kann), [316] beschreibt dieses aber nicht näher, sondern stellt hauptsächlich seine Versuchsträger für die automatische Fahrzeugsteuerung vor, bei denen es sich um umgebaute Klein- bzw. Rangierlokomotiven handelt.
Abbildung
14: Skizze eines Containertragwagens mit eigenem Antrieb
(Quelle:
Frederich (1992a, S. 42))
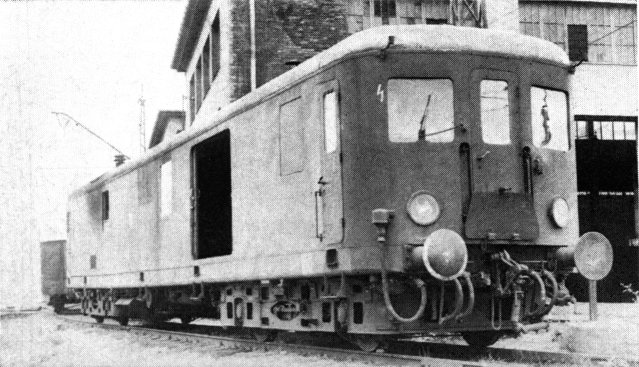
Einen kleinen zweiachsigen Gütertriebwagen hat das TIAW [317] im Rahmen eines Forschungsprojekts entwickelt [318] - stellt man sich dieses Fahrzeug ohne das Fahrerhaus vor, so vermittelt es m. E. einen guten Eindruck vom möglichen Erscheinungsbild eines automatisch fahrenden Gütertriebwagens. [319]
Abbildung
15: Gütertriebwagen für den Betrieb mit Fahrer
(Quelle:
O.
V.
(o.
J.))
Im Vergleich dazu erscheint der CargoSprinter (Abbildung 2) als immer noch relativ groß. Auch beim CargoSprinter wurde, so wie dies hier für einen fahrerlosen Gütertriebwagen angenommen wird, auf Lkw-Technologie zurückgegriffen, [320] es wurden jedoch nicht alle Möglichkeiten für konsequenten Leichtbau ausgeschöpft, da zum einen die Möglichkeit bestehen soll, mehrere CargoSprinter für längere Strecken zusammenzukoppeln, [321] was eine entsprechende Festigkeit in Längsrichtung zur Übertragung der Zugkräfte bedingt, zum anderen aber auch das Eisenbahnbundesamt eine Beständigkeit gegen Längskräfte fordert, die weit über dem beim Straßenverkehr üblichen liegt. [322] Bei einer Zuladung von 160 t (bei einer Höchstgeschwindigkeit von 100 km/h bzw. 112 t für 120 km/h) - dies entspricht rund sechs bzw. vier Lkw-Ladungen - entspricht auch eine Motorleistung von insgesamt 1.440 PS (1.060 kW) in etwa einer üblichen Lkw-Motorisierung. [323]
Ein fahrerloser Gütertriebwagen, der der Bahn eine erhöhte Flexibilität verschaffen soll, darf beim gegebenen Elektrifizierungsgrad nicht auf das Vorhandensein eines Fahrdrahtes angewiesen sein. Ein solches Fahrzeug sollte daher mit einem Dieselmotor als Antrieb ausgerüstet sein, [324] da ein Vorteil, wie beim CargoSprinter, in der unkomplizierten Bedienung von privaten Gleisanschlüssen liegt, die i. d. R. nicht elektrifiziert sind. Darüber hinaus liegt ein weiterer Vorteil in der Möglichkeit der Nutzung wenig ausgelasteter Nebenstrecken, deren Grenzkosten der Nutzung in verkehrsarmen Zeiten nahe null liegen. Auch Frederichs Versuchsbetrieb zwischen zwei Werken eines Automobilherstellers wird, wohl aus diesen Gründen, mit einer umgebauten Diesel- und nicht Elektrolokomotive durchgeführt.
Trotz des niedrigeren Rollwiderstands wird hier, als worst case-Annahme, [325] davon ausgegangen, daß ein einzelfahrender Gütertriebwagen einen ähnlich starken Motor wie ein Lkw benötigt - auch der CargoSprinter ist ja entsprechend hoch motorisiert. Dies begründet sich aus der Notwendigkeit zum zügigen Beschleunigen, wenn in Ballungsgebieten kurzzeitig Strecken des Personennahverkehrs mitgenutzt werden müssen. [326] Es erscheint plausibel, daß ein solcher Lkw-Motor, wie beim CargoSprinter, [327] mit einem entsprechenden Automatikgetriebe gekoppelt werden wird, wenn auch bisher mit Dieselmotoren angetriebene Eisenbahnfahrzeuge i. d. R. lediglich mit einem hydraulischen Drehmomentwandler oder elektrischer Kraftübertragung ausgestattet werden und kein Schalt- oder Automatikgetriebe mit mehreren verschiedenen mechanisch festgelegten Übersetzungen besitzen (oder nur eines, das, im Stand geschaltet, den grundsätzlichen Betriebsmodus wählt). [328]
Die Abbildung des Fahrwerks eines Zahnrad-Schienenbusses der Baureihe VT 97 zeigt, daß es schon auf dem Stand der Technik zu Beginn der sechziger Jahre möglich war, ein Fahrwerk mit platzsparendem Unterflurantrieb für kleine Eisenbahnfahrzeuge zu realisieren, das, mit einem moderneren Motor und Getriebe ausgestattet, fast unverändert auch für einen fahrerlosen Gütertriebwagen Verwendung finden könnte. [329]
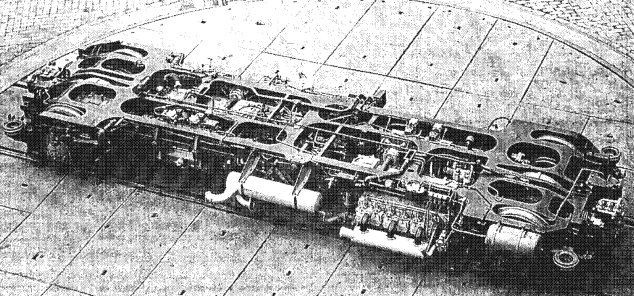
Abbildung
16: Fahrwerk eines Schienenbusses der Baureihe VT 97
(Quelle:
Lötgers (1997, S. 38))
Für einen fahrerlosen Gütertriebwagen könnte man also in etwa folgende technische Eckdaten als plausibel festlegen: [330]
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Der schon bei Rosebrock (1992, S. 29f) angesprochene Vorschlag der Verknüpfung mit dem RoadRailer-Prinzip wäre m. E. weiterhin anzustreben, allerdings erfordert der Transport eines Sattelaufliegers auf einem einzelnen zweiachsigen Fahrzeug eine andere konstruktive Ausführung. Auch die kürzlich neu vorgestellte ALS-Technologie, die die Umladevorrichtung für den kombinierten Verkehr mit Sattelaufliegern am Eisenbahnfahrzeug mitführt, scheint hinsichtlich der Kombinationsmöglichkeiten mit dem fahrerlosen Gütertriebwagen zumindest untersuchungswürdig. [334]
Eine Ergänzung des Verkehrsangebots der Schiene um Transporte mit Fahrzeugen, die sowohl in Größe und Ladekapazität als auch in ihrer Flexibilität einem Lkw entsprechen, zielt auf die Nachfrage nach dem Transport von Gütern, die im bisherigen technischen Rahmen als Lkw-affin einzustufen sind. Wenn, wie im folgenden gezeigt wird, fahrerlose Gütertriebwagen mit geringeren externen Kosten verbunden sind als Lkws, dann wird die erfolgreiche Einführung solcher Fahrzeuge die externen Kosten des Verkehrs sinken lassen, auch wenn der althergebrachte Eisenbahnverkehr wegen des niedrigeren Luftwiderstands noch besser dasteht - er kann bestimmte, stetig wachsende Teile der Nachfrage nicht mehr erreichen.
Ein Gütertriebwagen, so wie er oben skizziert wurde, entspricht weitgehend einem Lkw, der jedoch mit Eisenbahnrädern ausgestattet ist. Ein solches Fahrzeug hat also den Rollwiderstand eines Eisenbahnfahrzeugs und den Luftwiderstand eines Lkws (vgl. Tabelle 8). Da der Luftwiderstand von der Fahrgeschwindigkeit abhängig ist, kann ein Wert für den Fahrwiderstand nur jeweils für eine bestimmte Geschwindigkeit [335] angegeben werden, als typischer Wert für den Güterverkehr wurden hier 80 km/h angesetzt.
Tabelle 8: Übersicht über den Fahrwiderstand beim Straßen- und Schienengütertransport einerseits und den zu erwartenden Fahrwiderstand fahrerloser Gütertriebwagen andererseits (Geschwindigkeit: 80 km/h; eigene Berechnungen auf der Basis der Werte in Kapitel 4.1; Dimension: benötigte Antriebskraft pro Gewichtskraft des Fahrzeugs)
|
|
Straße |
Schiene[336] |
Gütertriebwagen[337] |
|---|---|---|---|
|
Rollwiderstand |
7 % |
3 % |
3 % |
|
Luftwiderstand |
6,94 % |
0,667 % |
6,94 % |
|
Fahrwiderstand |
13,94 % |
3,667 % |
9,94 % |
Zu beachten ist, daß dies die zulässige Höchstgeschwindigkeit des Straßengüterverkehrs ist, daß also die Durchschnittsgeschwindigkeit deutlich niedriger liegt. Dies führt zu einer systematischen Unterschätzung der Vorzüge der automatischen Gütertriebwagen, da bei niedrigeren Geschwindigkeiten der geringere Rollwiderstand stärker zum Tragen kommt.
Um diese Werte zu den externen Kosten des Straßen- und Schienenverkehrs in Bezug setzen zu können, ist es notwendig, sie nicht, wie im Ingenieurwesen üblich, auf das Gesamtgewicht des Fahrzeugs zu beziehen, sondern auf das Gewicht der Ladung. [338] Es ist also die benötigte Antriebskraft pro Gewichtskraft der Ladung anzugeben, da die spezifischen externen Kosten ja auf die Transportleistung bezogen sind, die ebenfalls das Gewicht der Ladung als Faktor beinhalten, nicht das Fahrzeuggewicht. Die entsprechenden Werte finden sich in Tabelle 9. Wegen des nahezu identischen Ladegewicht-Nutzlast-Verhältnisses ändert sich allerdings an den Relationen gegenüber Tabelle 8 nichts.
Tabelle 9: Übersicht über den ladegewichtsspezifischen Fahrwiderstand beim Straßen- und Schienengütertransport einerseits und den zu erwartenden ladegewichtsspezifischen Fahrwiderstand fahrerloser Gütertriebwagen andererseits (Geschwindigkeit: 80 km/h; eigene Berechnungen auf der Basis der Werte in Kapitel 4.1; Dimension: benötigte Antriebskraft pro Gewichtskraft der Ladung)
|
|
Straße |
Schiene[339] |
Gütertriebwagen[340] |
|---|---|---|---|
|
Rollwiderstand |
10,37 % |
4,306 % |
4,306 % |
|
Luftwiderstand |
10,29 % |
0,9574 % |
10,29 % |
|
Fahrwiderstand |
20,66 % |
5,263 % |
14,59 % |
Tabelle 10 zeigt, daß der lohnendste Ansatzpunkt für eine weitere Energieeinsparung (und damit ceteris paribus auch geringere Emissionen und somit auch geringere externe Effekte) in einer Verringerung des Luftwiderstands eines fahrerlosen Gütertriebwagens besteht. Wegen des geringen Rollwiderstands werden bei einem solchen Fahrzeug, wenn es einzeln mit 80 km/h dahinfährt, nämlich mehr als zwei Drittel des Fahrwiderstands durch den Luftwiderstand verursacht. Ansatzmöglichkeiten wären einerseits eine verbesserte Aerodynamik, andererseits aber auch die oben (Fn. 303) schon angesprochene Möglichkeit des Windschattenfahrens durch eine "virtuelle Kupplung" zwischen den Wagen, so wie dies für Kfz im Rahmen von PROMETHEUS [341] entwickelt wurde. Die dadurch möglichen Einsparungen wurden hier bewußt nicht berücksichtigt, da sie zum einen erst bei einer gewissen Verbreitung solcher Fahrzeuge realisiert werden können und zum anderen versucht wurde, keine zweifelhaften Annahmen zugunsten der fahrerlosen Gütertriebwagen zu machen.
Tabelle 10: Anteile des Roll- und Luftwiderstands am Fahrwiderstand beim Straßen- und Schienengütertransport einerseits und bei fahrerlosen Gütertriebwagen andererseits (Geschwindigkeit: 80 km/h; eigene Berechnungen)
|
|
Straße |
Schiene |
Gütertriebwagen |
|
Rollwiderstand |
50% |
82% |
30% |
|
Luftwiderstand |
50% |
18% |
70% |
|
Fahrwiderstand |
100% |
100% |
100% |
Betrachtet man den Verlauf des Fahrwiderstands in Abhängigkeit von der Fahrgeschwindigkeit, so ist einerseits zu erkennen, daß wegen des dominierenden Einflusses des Luftwiderstands fahrerlose Einzelwagen auch durch eine Verstetigung der Fahrgeschwindigkeit deutliche Einsparungen realisieren könnten, [342] andererseits wird aber auch die Verlockung verständlich, innerhalb des gegebenen Eisenbahnparadigmas mit langen Zügen die Fahrgeschwindigkeit immer weiter zu erhöhen - die Zunahme des Fahrwiderstands ist im relevanten Geschwindigkeitsbereich fast vernachlässigbar klein.
Abbildung 17: Der ladegewichtsspezifische Fahrwiderstand beim Straßen- und Schienengütertransport einerseits und der zu erwartende ladegewichtsspezifische Fahrwiderstand fahrerloser Gütertriebwagen andererseits in Abhängigkeit von der Fahrgeschwindigkeit (eigene Berechnungen)
Die verschiedenen Teilaspekte der externen Kosten des Straßen- und Schienenverkehrs verändern sich in unterschiedlichem Ausmaß, wenn ein automatisierter und dezentralisierter Eisenbahngüterverkehr eingeführt wird. Die im vorstehenden Teil von Gliederungspunkt 5.2 diskutierten naturwissenschaftlich-technischen Einflüsse wirken sich lediglich auf die externen Kosten durch Luftverschmutzung und auf die externen Kosten durch den Treibhauseffekt aus. Wie aus Tabelle 7 bzw. Tabelle 11 abzulesen ist, sind die externen Kosten durch Luftverschmutzung und Treibhauseffekt jedoch keineswegs der einzige, ja noch nicht einmal der bedeutendste Teil der externen Kosten des Güterverkehrs.
Für die für automatisch fahrende, dezentral gesteuerte Gütertriebwagen zu erwartenden spezifischen externen Kosten durch Unfälle - der bedeutendste Block an externen Kosten beim Straßengüterverkehr - werden vor dem Hintergrund der Diskussion in Kapitel 4.3, die kein eindeutiges Ergebnis zeigt, im Sinne einer vorsichtigen Abschätzung die Werte für den bisherigen Schienenverkehr genommen. Es ist zwar einerseits unklar, ob die Automatisierung letztlich risikomindernd oder riskoerhöhend wirkt, andererseits ist aber bei einer Automatisierung des Güterverkehrs das Risiko von zusätzlichen Personenschäden auch dann extrem klein, falls es zu vermehrten Unfällen kommen sollte.
Auch für die für automatisch fahrende, dezentral gesteuerte Gütertriebwagen zu erwartenden spezifischen externen Kosten durch Lärm werden im Sinne einer vorsichtigen Abschätzung die Werte für den bisherigen Bahntransport herangezogen. Es wird zwar einerseits der Lärm straßenähnlicher, wodurch 5 dB der um 10 dB weniger störenden Lärmcharakteristik des Schienenverkehrs verloren gehen, andererseits besteht aber die Chance, durch neue Fahrzeuge und eine Orientierung am Stand der Lkw-Technik [343] wesentlich lärmarmere Fahrzeuge zu bekommen, als z. B. bei einem schrittweisen Ersatz der bisher genutzten Güterwagen möglich erscheint.
Da kurzfristig von einer unveränderten Schieneninfrastruktur ausgegangen werden kann (und der automatisierte und dezentralisierte Eisenbahngüterverkehr u. a. auch mit dem Ziel einer besseren Auslastung der Schieneninfrastruktur propagiert wird) ist davon auszugehen, daß sich weder Flächenverbrauch noch Trennwirkungen ändern. Die jeweiligen transportleistungsspezifischen Größen werden zwar durch eine bessere Ausnutzung der gegebenen Infrastruktur tendenziell sinken, dies wird jedoch wegen der schlechten Quantifizierbarkeit aus Vorsichtsgründen vernachlässigt.
Tabelle 11: Übersicht über die spezifischen externen Kosten des Straßen- und Schienengüterverkehrs einerseits und die zu erwartenden externen Kosten fahrerloser Gütertriebwagen andererseits (eigene Berechnungen auf der Basis der Werte aus Tabelle 7; Werte in DM pro tkm)
|
|
Straßengüterverkehr |
Schienengüterverkehr |
Fahrerlose Gütertriebwagen |
|---|---|---|---|
|
Unfälle |
0,0139 bis 0,0377 |
0,0017 bis 0,0049 |
0,0017 bis 0,0049 |
|
Luftverschmutzung |
0,0046 bis 0,0168 |
0,0004 bis 0,0015 |
0,0027 bis 0,0096 |
|
Treibhauseffekt |
0,0017 |
0,0004 |
0,0011 |
|
Lärm |
0,0035 bis 0,0627 |
0,0011 bis 0,0324 |
0,0011 bis 0,0324 [344] |
|
Flächenverbrauch |
0,0001 bis 0,0012 |
0,00005 |
0,00005 |
|
Trennwirkung |
0,0012 |
unbekannt |
unbekannt |
|
Staukosten |
0,0075 bis 0,1045 |
0,0000 |
Untergrenze 0,0000 Obergrenze unbek. |
|
Summe[345] |
0,0325 bis 0,2259 |
0,0036 bis 0,0395 |
0,0066 bis 0,0484 |
Die Untergrenze für Staukosten (im Sinne externer Kosten) ist null, sie wird dann erreicht, wenn die Benutzungsgebühren für die Infrastruktur die Knappheit richtig wiedergeben. Dies scheint auf der Schiene leichter durchsetzbar zu sein, als auf der Straße, da in der Folge der Bahnreform nutzungsabhängige Zahlungen für das Fahren auf der Schiene eingeführt wurden, die "nur" noch besser an die Knappheiten angepaßt werden müßten, während eine solche Bepreisung der Infrastruktur beim Straßenverkehr mit großen politischen Problemen in der Durchsetzung verbunden ist. [346]
Die Obergrenze für Staukosten auf der Schiene bei Einführung eines automatisierten und dezentralisierten Eisenbahngüterverkehrs ist im Rahmen dieser Arbeit nicht feststellbar, da nicht nur Informationen über die "richtige" Höhe der durchschnittlichen Trassenpreise fehlen bzw. umstritten sind, [347] sondern zusätzlich Informationen über strecken- und zeitabhängige Knappheiten nötig wären.
Abbildung 18: Spezifische externe Kosten beim Straßen- und Schienengütertransport einerseits und zu erwartende spezifische externe Kosten fahrerloser Gütertriebwagen andererseits in Abhängigkeit von der Fahrgeschwindigkeit (nicht-fahrwiderstandsabhängige Größen konstant; [348] eigene Berechnungen)
Unter Berücksichtigung dieser Überlegungen ergibt sich das in Tabelle 11 dargestellte Bild der spezifischen externen Effekte eines automatisierten und dezentralisierten Eisenbahngüterverkehrs.
Wegen der oben (S. 106) erläuterten Abhängigkeit des Fahrwiderstands von der Geschwindigkeit können die in Tabelle 11 gezeigten Ergebnisse wiederum nur auf der Basis einer angenommenen typischen Geschwindigkeit errechnet sein. Es sind dies, wie auch zuvor schon, wieder 80 km/h als "typische Streckengeschwindigkeit". Auf der Basis der Tabelle 11 zugrundeliegenden Berechnungen kann, analog zu Abbildung 17, auch gezeigt werden, wie sich die spezifischen externen Kosten bei einer Variation der typischen Streckengeschwindigkeit verändern. Dies ist in den Abbildungen 18 und 19 zu sehen.
Abbildung 19: Spezifische externe Kosten beim Straßen- und Schienengütertransport einerseits und zu erwartende spezifische externe Kosten fahrerloser Gütertriebwagen andererseits in Abhängigkeit von der Fahrgeschwindigkeit (nicht-fahrwiderstandsabhängige Größen linear wachsend; [349] eigene Berechnungen)
In den Abbildung 18 zugrundeliegenden Berechnungen wurden dabei die externen Kosten durch Unfälle, Lärm, Flächenverbrauch, Trennwirkung und Staus als von der Fahrgeschwindigkeit unabhängig angenommen, während in Abbildung 19 diese nicht-fahrwiderstandsabhängigen Größen als mit der Geschwindigkeit linear wachsend eingestuft wurden. Bei beiden Varianten ist zu erkennen, daß fahrerlose Gütertriebwagen eine deutliche Reduzierung der externen Kosten des Gütertransports ermöglichen, da ihre spezifischen externen Kosten im gesamten güterverkehrsrelevanten Geschwindigkeitsbereich wesentlich näher an den niedrigen spezifischen externen Kosten des Schienengüterverkehrs als an den hohen spezifischen externen Kosten des Straßengüterverkehrs liegen.
Dieses Ergebnis bestätigt nicht nur die zentrale Hypothese der Arbeit, sondern geht in seiner Deutlichkeit ein Stück über sie hinaus. Lag der Arbeit ursprünglich nur die Vermutung zugrunde, daß, so wie dies in Abbildung 17 für den Fahrwiderstand erkennbar wird, ein fahrerloser Gütertriebwagen hinsichtlich seiner externen Kosten etwa "in der Mitte" zwischen Lkw und Güterzug zu finden sein wird, so hat sich in der Untersuchung gezeigt, daß die Verschlechterung der spezifischen externen Kosten gegenüber der Eisenbahn wesentlich kleiner als erwartet ist.
In diesem Kapitel waren nun die zu erwartenden spezifischen externen Effekte eines automatisierten und dezentralisierten Eisenbahngüterverkehrs zu bestimmen. Zu diesem Zweck wurde zunächst eine plausible Ausführung eines solchen Fahrzeugs skizziert - ein zweiachsiger Wagen mit einer einem Sattelschlepper entsprechenden Ladekapazität. Aus den bis dahin erarbeiteten Werten wurden dann über den ladegewichtsspezifischen Fahrwiderstand als Zwischenschritt die spezifischen externen Kosten errechnet. Dabei zeigten sich bei einer genauen Betrachtung des ladegewichtsspezifischen Fahrwiderstands zwei Dinge:
Die spezifischen externen Kosten eines automatischen Gütertriebwagens liegen zwar, wie erwartet, zwischen denen des herkömmlichen Eisenbahnverkehrs und denen des Straßengüterverkehrs, jedoch entgegen den Erwartungen wesentlich näher bei denen der Eisenbahn - selbst eine Substitution von jetzigen Zugverkehren durch solche mit automatischen Einzelwagen hätte nur ein minimales Ansteigen der externen Effekte zur Folge; jede Verlagerung von Straßentransporten auf die Schiene hingegen eine deutliche Verringerung.
Mit der Feststellung, daß eine Einführung eines automatisierten und dezentralisierten Eisenbahngüterverkehrs eine Verringerung der spezifischen externen Kosten erwarten läßt, ist die Frage nach Potentialen zur Verringerung der externen Effekte des Güterverkehrs noch nicht beantwortet, denn dazu ist auch zu berücksichtigen, inwieweit durch eine solche neue Technologie das gesamte Güterverkehrsvolumen systematisch beeinflußt wird.
Neben der naheliegenden Feststellung, daß sich ein automatisierter Einzelwagenverkehr auf der Schiene im Wettbewerb mit dem Straßenverkehr nur durchsetzen kann, wenn er eine vergleichbare Qualität der Verkehrsdienstleistung zu niedrigeren Kosten anbieten kann (oder eine verbesserte Qualität der Verkehrsdienstleistung zu konstanten Kosten [350]) - d. h., daß Transporte tendenziell billiger werden -, ist hierbei besonders zu beachten, daß vor dem Hintergrund systemtheoretisch orientierter Analysen der Verkehrsentwicklung [351] zu erwarten ist, daß ein Erfolg einer solchen Technologie "überschießt" und Verkehre an sich bindet, die bisher mit geringeren spezifischen externen Kosten in langen Zügen auf der Schiene transportiert werden.
Beide Effekte führen tendenziell zu einem Anstieg der externen Kosten, wobei nicht von vornherein klar ist, ob lediglich die Verringerung weniger groß ausfällt oder aber letztlich doch überkompensiert wird.
Aber letzten Endes ist ja aus der relativ größeren Umweltfreundlichkeit, [352] den geringeren externen Effekten dieser neuen Verkehrstechnologie auch nicht abzuleiten, daß eine Internalisierung der externen Kosten nicht erfolgen soll. Und die zu erwartenden Effekte des Gesamtsystems erinnern daran, daß eine Internalisierung, wenn sie unter Einbezug der Transaktionskosten [353] lohnend erscheint, auch durchgeführt werden sollte, unabhängig davon, ob sich durch den technischen Fortschritt zufällig eine Verringerung der externen Kosten ergibt, weil sonst die Anreizwirkung der relativen Preise weiterhin verzerrt bleibt.
Ein anderer möglicher Einwand gegen das hier entwickelte Ergebnis könnte sein, daß seit 1990 möglicherweise solch große Fortschritte bei der Reduktion der externen Effekte des Straßengüterverkehrs gemacht wurden (oder in nächster Zeit zu erwarten sind), daß das hier thematisierte Grundproblem (externe Effekte des Güterverkehrs) weitgehend die Relevanz verloren hat.
Technische Fortschritte gab es beim Straßengüterverkehr vor allem bei den luftverschmutzungsbedingten externen Kosten. Das Volumen der externen Effekte durch Luftverschmutzung ist also vermutlich inzwischen kleiner als 1990 und sinkt weiterhin. Um eine grobe Abschätzung vorzunehmen, habe ich den durchschnittlichen Reduktionsfaktor für die Abgasgrenzwerte zwischen Euro 0 (Stand 1988/90) und Euro 4 (gültig ab 2005) berechnet: [354] Es ist etwa ein Faktor von 10, um den die Emissionen von Kohlenmonoxid, Kohlenwasserstoffen, Stickoxiden und Dieselruß pro kWh zurückgehen. Allerdings erlauben es für den Lkw entwickelte "sauberere" Motorentechnologien auch, einen neu entwickelten Gütertriebwagen entsprechend umweltfreundlich anzutreiben.
Auch im Bereich der Straßenverkehrsunfälle sind über lange Zeit konstante Fortschritte zu beobachten - am dramatischsten ist dabei wohl der positive Effekt der Sicherheitsgurte und der Gurtpflicht. Betrachtet man die Entwicklung der Beteiligung der Fahrzeugführer von Güterkraftfahrzeugen an Unfällen mit Personenschaden, so kann man von 1991 bis 1997 einen Rückgang der fahrleistungsspezifischen Werte um rund 10% feststellen. [355]
Korrigiert man die Grafiken um diese Faktoren, so daß sie die externen Kosten 1990 mit dem spezifischen Lkw-Unfallrisiko von 1997 und dem spezifischen Schadstoffausstoß von Lkw-Motoren 2005 zeigt, ergibt sich folgendes Bild:
Abbildung 20: Spezifische externe Kosten unter der Annahme, daß alle Lkw und die fahrerlosen Gütertriebwagen die Euro 4 Abgasgrenzwerte einhalten und unter Berücksichtigung des Rückgangs der spezifischen Unfallhäufigkeit beim Straßengüterverkehr von 1990 bis 1997(eigene Berechnungen; zur Verdeutlichung wurden zusätzlich mit der dunklen Markierung die Werte der Abbildungen 18 und 19 eingezeichnet, die neuberechneten Kurven für Lkw und Gütertriebwagen sind hell markiert)
Man erkennt, daß der Einfluß der vom Fahrwiderstand abhängigen externen Kosten durch Luftverschmutzung zurückgegangen ist - an dem sichtbaren Unterschied in der Größenordnung der externen Effekte zwischen Straßen- und Schienenverkehr ändert sich nichts.
[311] Vgl. z. B. Obermayer (1977b).
[312] Vgl. o. V. (1997c) sowie o. V. (1997f).
[313] Vgl. Obermayer (1977b, S. 120f), allerdings wurden beide Fahrzeuge schon Ende des letzten Jahrhunderts in Dienst gestellt, was diese Motorleistung relativ weniger gering erscheinen läßt. Strenggenommen ist daher auch der Vergleich mit Straßenfahrzeugen nicht ganz adäquat.
[314] Vgl. Obermayer (1977b, S. 148), auch hier ist das Baujahr (1938) zu beachten, wenn die Motorleistung mit der von Straßen- und anderen Schienenfahrzeugen verglichen wird.
[315] Das Prinzip, ein Sattelauflieger, den man als "nahezu bimodal" bezeichnen könnte, da er zwar sowohl auf Straßen als auch auf Schienen fahren kann, jedoch das Eisenbahnfahrgestell nicht selbst mitführt, wird auch unter dem Namen Trailerzug vermarktet. Vgl. z. B. Kuhla (1990).
[316] So ist z. B. die Funktion der Puffer an einem Fahrzeug für Einzelwagenverkehr nicht unmittelbar einsichtig und wohl eher als Atavismus, bedingt durch das bestehende Eisenbahnparadigma, zu verstehen, als sachlich zu begründen.
[317] Das ist das Thüringer Institut für akademische Weiterbildung e. V.
[318] Das Fahrzeug ist Bestandteil eines als "Regionales Logistik System - RLS" bezeichneten Gesamtkonzepts. Vgl. für einen groben Überblick o. V. (o. J.).
[319] Für das Projekt eines flexiblen, lokal begrenzten Schienengüternahverkehrs des TIAW wäre es eine große Vereinfachung, wenn das Fahrzeug fahrerlos fahren könnte, da eine aufwendige mechanische Lösung zum Umsetzen der Fahrerkabine entwickelt werden mußte, um Zweirichtungsbetrieb und das Aufnehmen von Wechselbehältern vereinbaren zu können. Die Option des automatischen Fahrens wurde als zwar wünschenswert (wörtlich: "ideale Lösung"), aber wegen bestehender Regelungen nicht durchsetzbar verworfen. Vgl. Blandow / Hempel (1995, S. 193).
[320] Vgl. Feth (1997).
[321] Vgl. Feth (1997).
[322] Vgl. für das entsprechend gelagerte Problem beim Leichtbau von Personennahverkehrstriebwagen z. B. Schall (1997, S. 25) und Koschinski (1997, S. 31). Die geforderte Beständigkeit gegen Längskräfte ist bei Eisenbahnfahrzeugen, die zu langen Zügen zusammengestellt werden, notwendig und sinnvoll, sie wird allerdings zu einem bedenklichen Hemmnis für eine leichtere und energiesparende Bauweise der Fahrzeuge, wenn sie mit Sicherheitsargumenten auch bei Triebwagen, die niemals in Züge eingestellt werden sollen, gefordert wird.
[323] Vgl. zu den technischen Daten des CargoSprinters die Übersicht bei Dorn (1997, S. 330).
[324] Selbstverständlich können und sollen innovative Antriebskonzepte, wie z. B. die Stromerzeugung aus Wasserstoff in Brennstoffzellen (vgl. z. B. Jacobi 1997 sowie Weigel 1997) als Optionen nicht außer Acht gelassen werden - solange allerdings kein Lkw-Hersteller solche Prototypen zeigt, wäre vor einem entsprechenden Versuch bei einem fahrerlosen Gütertriebwagen zunächst zu begründen, warum er gerade bei diesem Konzept lohnend sein könnte, wenn er es beim Straßengüterverkehr anscheinend noch nicht ist. Auch neue Verfahren zur Emissionsreduktion, die für Lkw entwickelt werden (vgl. z. B. Rothenberg 1997), lassen sich selbstverständlich ebenso bei einem automatisch fahrenden Gütertriebwagen einsetzen - auch die Antriebsmotoren des CargoSprinters erfüllen die Abgasnorm Euro II für Lkw (vgl. Dorn 1997, S. 330 und Feth 1997).
[325] Professor Frederich äußerte auf der Tagung der Interdisziplinären Arbeitsgruppe Technologieforschung am 12. und 13.10.1993 in Frankfurt am Main mir gegenüber die Ansicht, ein Pkw-Dieselmotor sei für solch ein Fahrzeug völlig ausreichend.
[326] In einem an den Grenzkosten der Nutzung orientierten Trassenpreissystem wird ein Güterzug oder -triebwagen, der wegen zu geringer Beschleunigungsfähigkeit mehr als einen Personennahverkehrszug verdrängt, einen entsprechend höheren Preis für den Fahrweg zahlen, als ein Fahrzeug, daß sich von der Fahrcharakteristik her so wie ein Personennahverkehrszug verhält. Umgekehrt ist es selbstverständlich auf Güterzugstrecken störend und damit teurer, wenn man häufig halten und dann schnell wieder beschleunigen will. Vgl. auch Bitterberg (1997), der die gegenseitige Behinderung von Güter- Personennah- und -fernverkehr schildert, um sein Plädoyer für ein eigenes Güterfernverkehrsnetz zu stützen.
[327] Vgl. Dorn (1997, S. 329).
[328] Vgl. zu aktuellen Entwicklungen bei der Technologie der Automatikgetriebe z. B. Wildhage (1997a), zur Getriebetechnologie bei Eisenbahnfahrzeugen Obermayer (1975, S. 46 - 49).
[329] Es sollte allerdings durch die Fortschritte bei Materialien und Konstruktionen an sich ebenfalls möglich sein, auch das Gewicht des Fahrwerks deutlich zu reduzieren.
[330] Die Kategorien orientieren sich an der Beschreibung des CargoSprinters in Dorn (1997, S. 330).
[331] Berechnungen des TIAW für deren Fahrzeug zeigen, daß es ausreicht, eine der beiden Achsen anzutreiben, vgl. Blandow / Hempel (1995, S. 127).
[332] An sich ist kein Grund erkennbar, die Höchstgeschwindigkeit so zu limitieren, da das Fahrzeug mit dieser Motorleistung schneller zu fahren in der Lage sein sollte. Aber schon diese Höchstgeschwindigkeit würde für eine gegenüber dem Straßengüterverkehr deutlich reduzierte Transportdauer sorgen.
[333] Ein Antiblockiersystem ("Gleitschutz") dient zwar bei Schienenfahrzeugen nicht, wie bei Straßenfahrzeugen, dazu, die Lenkbarkeit bei Vollbremsungen zu erhalten, es ermöglicht aber die nahezu vollständige Ausnutzung der physikalisch möglichen Bremsverzögerung, ohne, wie im herkömmlichen Eisenbahnbetrieb, Schäden an den Radreifen und Riffelbildung auf den Schienen zu riskieren (vgl. o. V. 1997m).
[334] Vgl. zum ALS (Automatic Loading System) Wildhage (1997b). Das Manko des Systems liegt allerdings im Gewicht der Umladevorrichtung, die jeder Wagen mitführt.
[335] Und für jeweils eine bestimmte Beschleunigung in Längsrichtung. Aus Vereinfachungsgründen erfolgen alle entsprechenden Berechnungen in dieser Arbeit für eine Beschleunigung in Längsrichtung von null m/s2, d. h. für eine Fahrt mit konstanter Geschwindigkeit in der Ebene.
[336] Beim Rollwiderstand ist auch der dynamische Widerstand mit 1 % enthalten. Ein Teil dieses dynamischen Widerstands, nämlich der durch Translationsbewegungen entstehende, ist m. E. durch die Zugbildung verursacht, und fällt bei einem Gütertriebwagen weg, was aber wegen fehlender genauer Daten und der Geringfügigkeit dieser Widerstandskomponente vernachlässigt wird. Des weiteren lassen aktive Federungssysteme für Schienenfahrzeuge, wie sie z. Zt. entwickelt werden, insgesamt eine Reduzierung der Schwingungsbewegungen erwarten (vgl. Lübke / Mayer 1997, S. 448).
[337] Auch hier ist der dynamische Widerstand im Rollwiderstand mit 1 % enthalten, vgl. Fn. 336.
[338] Es wird im weiteren bei allen drei Vergleichsobjekten (typischer Lkw, typischer Güterzug, fahrerloser Gütertriebwagen) von einer Auslastung von 100% ausgegangen.
[339] Auch hier ist der dynamische Widerstand im Rollwiderstand mit 1 % enthalten, vgl. Fn. 336.
[340] Auch hier ist der dynamische Widerstand im Rollwiderstand mit 1 % enthalten, vgl. Fn. 336.
[341] Programme for a European Traffic with Highest Efficiency and Unprecedented Safety. Vgl. zum PROMETHEUS-Projekt Prätorius (1993).
[342] Vgl. auch Frederich (1994, S. 332), der rechnerisch zeigt, daß in der besseren Beschleunigungsfähigkeit von Einzelwagen ein Einsparpotential liegt, da sie bei gleicher Transportzeit mit einer geringeren Spitzengeschwindigkeit auskommen.
[343] Vgl. Reichert (1997), wo berichtet wird, daß die Reifen wegen der diversen lärmmindernden Maßnahmen an Fahrzeugen zwischenzeitlich die größte Lärmquelle bei Kraftfahrzeugen darstellen.
[344] Angesichts der Tatsache, daß die DBAG z. B. in ihrem Umweltbericht 1997 (vgl. Jopp / Eberhard 1998, S. 23) die Bedeutung von Schallschutzmaßnahmen am Fahrzeug betont, erscheint es gerechtfertigt, die zu erwartenden spezifischen externen Kosten automatisch fahrender Gütertriebwagen trotz der ungünstigeren, weil straßenähnlicheren, zeitlichen Verteilung des Lärms, als zumindest ebenso niedrig wie die des bisherigen Eisenbahngüterverkehrs einzuschätzen.
[345] Die Abweichungen gegenüber den Werten aus Tabelle 7, die direkt aus Bickel / Friedrich (1995) entnommen sind, ergeben sich durch Rundungsfehler.
[346] Vgl. Reinhold (1997), der aus diesem Grund Knappheitspreise für Straßeninfrastruktur nur bei neuen zusätzlichen Mautspuren an bestehenden Straßen für durchsetzbar hält. Es muß in diesem Zusammenhang aber auch beachtet werden, daß eine korrekte Anlastung der Kosten der Infrastrukturnutzung bei fahrerlosen Eisenbahntriebwagen einerseits und wesentlich zu niedrige Kosten der Infrastrukturnutzung beim Straßengütertransport andererseits die erfolgreiche Einführung des automatisierten und dezentralisierten Eisenbahngüterverkehrs schwer be- oder gar verhindern können.
[347] Vgl. neben Aberle / Brenner (1994) z. B. o. V. (1997d) und o. V. (1997e).
[348] Das heißt, daß Unfälle, Lärm, Flächenverbrauch, Trennwirkung und Staukosten als von der gefahrenen Geschwindigkeit unabhängig betrachtet werden.
[349] Das heißt, daß Unfälle, Lärm, Flächenverbrauch, Trennwirkung und Staukosten als linear mit der gefahrenen Geschwindigkeit ansteigend angesetzt werden.
[350] Als Grenzfall ist auch vorstellbar, daß bei ansonsten gleicher Qualität und gleichem Preis das Ansehen der Bahn als umweltfreundliches Verkehrsmittel und der damit mögliche Imagegewinn für Versender bzw. Spediteur den letzten Ausschlag gibt. Dies ist m. E. als Bestandteil der Qualität der Transportdienstleistung zu werten.
[351] Vgl. neben Kill (1991) und Heinze / Kill (1988) z. B. auch schon Voigt (1960, 1973).
[352] Vgl. die Erläuterung in Fn. 9.
[353] Im weitesten Sinne.
[354] Vgl. für die Werte der Euro-Abgasnormen z. B. o. V. (1998, S. 35).
[355] Vgl. Statistisches Bundesamt (1997, S. 69); eigene Berechnungen.
Voriges Nächstes Titelseite Inhaltsverzeichnis Abbildungsverzeichnis Tabellenverzeichnis
© RHR